Гироскоп-кое и иммерсионное воздействие на человека
ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ № 192033
УСТРОЙСТВО ГИРОСКОПИЧЕСКОГО И ИММЕРСИОННОГО ВОЗДЕЙСТВИЯ НА ЧЕЛОВЕКА ПРИ ГРАВИТАЦИОННОЙ РАСТЯЖКЕ
Полезная модель относится к устройствам и содержит в своей конструкции жесткую раму с возможностью гравитационного натяжения тела пользователя, которая закреплена на кардановый подвес, создающий в свою очередь гироскопический момент.
Устройство имеет емкость с возможностью заполнения ее внутреннего объема сухим, жидким или газообразным веществом, которое создает иммерсионный контакт с телом пользователя в состоянии гравитационного вытяжения, обеспечивая демпферное сопротивление силам гравитации и углового ускорения.
Устройство имеет возможность передачи информации в контроллер, собирающий данные с проводных и беспроводных датчиков, закрепленных на тросах и теле пользователя. Устройство позволяет создавать имитацию эффекта невесомости с различными прикладными целями.
Сферой применения устройства являются космонавтика, авиация, имитационные тренажеры, аттракционы, спорт, игры, психотерапия, психология, реабилитация, санаторно-курортное лечение, занятия танцами, оздоровительные практики, медицина. Устройство может применяться при проведении научно-практической, экспериментальной и исследовательской деятельности.
Аналоги (прототипы):
1. Из существующего уровня техники известно устройство (см., RU 183752 U1, МПК А63В 21/00 (2006.01)), содержащее плоскую жесткую раму на опорах, на которой крестообразно расположены растягивающие пользователя тросы, одни концы которых соединены с подвижными блоками, а другие - с четырьмя манжетами-держателями соответственно для рук и ног пользователя, лебедку для приведения в движение посредством блоков упомянутых тросов и динамометр, отличающееся тем, что оно снабжено тензометрическими проводными и беспроводными датчиками, при этом датчики установлены на каждом из растягивающих пользователя тросов с возможностью измерения натяжения для определения степени асимметрии тела пользователя и отклонения параметров от исходного состояния после растяжки, имеет тензометрические датчики, установленные на теле пользователя для определения параметров гомеостаза при растяжке тела и его локальных участков и отклонения параметров от исходного состояния после растяжки с передачей информации и индикацией в контроллер, собирающий данные с проводных и беспроводных датчиков. Недостатками данного технического решения, является то, что устройство имеет статичные опоры рамы и технически не позволяет создавать гироскопический момент с тремя степенями свободы и возможностью иммерсионного демпфирования нагрузки на тело пользователя при действии сил углового ускорения.
2. Из существующего уровня техники известно устройство иммерсионная ванна (см., RU 44505 U1, МПК А61Н 33/00 (2000.01)), представляющее собой иммерсионную ванну, состоящую из корпуса, с подключенной к нему системой трубопроводов для подачи и циркуляции воды, эластичного водонепроницаемого полотна, отличающаяся тем, что она снабжена ложементом с шарнирно-рычажным механизмом, размещенным внутри корпуса и выполненным с возможностью обеспечения возвратно-поступательного перемещения ложемента в вертикальном направлении, при этом шарнирно-рычажный механизм соединен тягой с редуктором, установленным в верхней части корпуса, поверх ложемента расположено эластичное водонепроницаемое полотно, края которого прикреплены к торцам стенок верхней части корпуса ванны, система трубопроводов для циркуляции воды снабжена электронагревательным устройством с автоматическим поддержанием температуры воды, а в ложементе выполнены отверстия, снабжена средством для установки ванны в фиксированном стационарном положении на заданном уровне относительно опорной поверхности, снабжена средством для ее перемещения в горизонтальном направлении. Техническим недостатком приведенного устройства является отсутствие технической возможности для гравитационного вытяжения тела пользователя и перемещения конструкции под различными углами. Ограничением приведенного устройства также является отсутствие возможности наполнения объема ванны сухим или газообразным иммерсионным веществом.
3. Из существующего уровня техники известно устройство для тренировки вестибулярного аппарата (см., RU 2639062 С1, МПК А63В 23/02 (2006.01)), содержащее стойку, привод вращения, ведущий кривошип, кабину, которые соединены между собой шарнирами, отличающееся тем, что ведущий кривошип выполнен в виде двух спаренных кривошипов, установленных с возможностью вращения на одной общей оси, и введены ведомый кривошип, ведущий пространственный стержень, который соединен с одной стороны с приводом вращения, при этом привод вращения выполнен в виде планетарного однорядного редуктора, с другой стороны - с ведомым кривошипом, шарнирно соединенным с кабиной, расположенной между двумя ведущими спаренными кривошипами, жестко посаженными на вал привода и шарнирно соединенными со стойкой, электродвигатель снабжен частотным преобразователем, управляемым компьютером, для регулирования многорежимности устройства. Техническим ограничением приведенного устройства является отсутствие возможности гравитационного вытяжения тела пользователя за конечности с возможностью иммерсионного демпфирования нагрузки на его тело.
Проблемой, на решение которой направлена полезная модель, является обеспечение персонализированного гироскопического воздействия на тело пользователя при гравитационной растяжке с целью имитации физических нагрузок и создания эффекта невесомости с иммерсионным демпфированием нагрузки в зависимости от маятниковых, колебательных, вибрационных движений при различных углах, времени и скорости.
Указанная проблема решается посредством устройства гироскопического и иммерсионного воздействия на человека при гравитационной растяжке, содержащее плоскую жесткую раму на опорах, на которой крестообразно расположены растягивающие пользователя тросы, одни концы которых соединены с подвижными блоками, а другие - с четырьмя манжетами-держателями соответственно для рук и ног пользователя, лебедку для приведения в движение посредством блоков упомянутых тросов и динамометр, снабжено тензометрическими проводными и беспроводными датчиками, при этом датчики установлены на каждом из растягивающих пользователя тросов с возможностью измерения натяжения для определения степени асимметрии тела пользователя и отклонения параметров от исходного состояния после растяжки, тензометрические датчики, установленные на теле пользователя для определения параметров гомеостаза при растяжке тела и его локальных участков и отклонения параметров от исходного состояния после растяжки с передачей информации и индикацией в контроллер, собирающий данные с проводных и беспроводных датчиков, отличающееся тем, что имеет плоскую жесткую раму с размещенным в ней пользователем в состоянии гравитационного натяжения закрепленную на внутреннюю раму двухосного карданового подвеса, соединенную с внешней рамой, которая в свою очередь закреплена на оправу подвеса со статичным основанием. Жесткая плоская рама имеет корпус, представляющий собой емкость с возможностью заполнения ее внутреннего объема сухим, жидким или газообразным веществом, которое создает иммерсионный контакт с телом пользователя в состоянии гравитационного вытяжения, обеспечивая тем самым демпферное сопротивление силам гравитации и угловому ускорению.
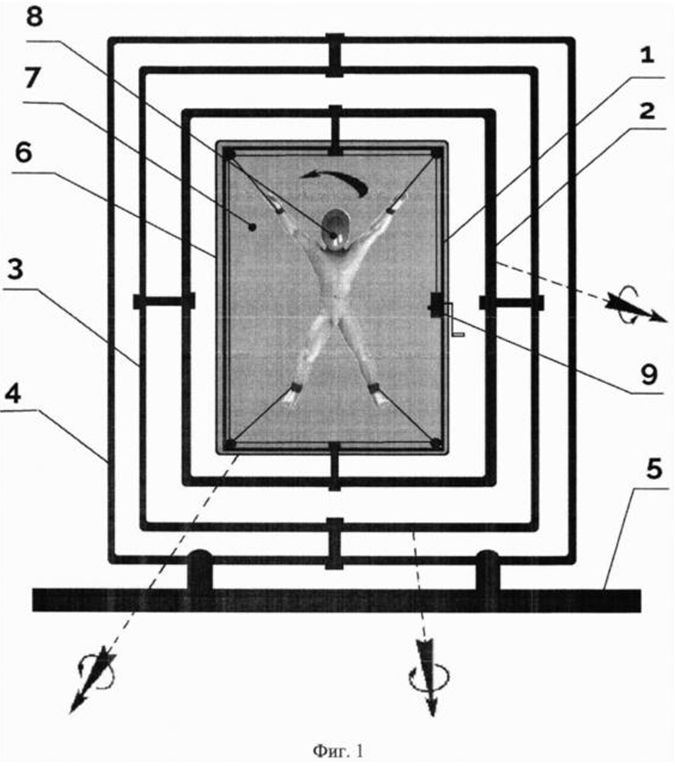
Схематично устройство гироскопического и иммерсионного воздействия на человека при гравитационной растяжке показано на Фиг. 1, где 1 - плоская жесткая рама, 2 - внутренняя рама, 3 - внешняя рама, 4 - оправа подвеса, 5 - статичное основание карданова подвеса, 6 - корпус жесткой рамы, 7 - емкость корпуса рамы с возможностью заполнения сухим, жидким или газообразным веществом, 8 - скафандр для подачи кислорода пользователю и обеспечивающий герметичную изоляцию тела от внешней среды, 9 - лебедка для гравитационного натяжения пользователя за конечности внутри рабочего пространства устройства.
Техническим результатом, является создание гироскопического и иммерсионного демпферного воздействия на тело пользователя с тремя степенями свободы конструкции в состоянии гравитационного вытяжения внутри рабочего пространства устройства.
Устройство гироскопического и иммерсионного воздействия на человека при гравитационной растяжке работает следующим образом: пользователь надевает на тело скафандр, герметично изолирующий тело от внешней среды, располагается во внутреннем пространстве жесткой рамы с закрывающимся корпусом; руки и ноги пользователя закрепляют в манжеты; при необходимости объем корпуса рамы заполняется сухим, жидким либо газообразным веществом, которое создает сухой иммерсионный контакт с телом пользователя через скафандр; используя лебедку и тросы (тяги) производят натяжение конечностей пользователя с определенным усилием, создавая тем самым гравитационную растяжку; далее производят запуск конструкции посредством векторного воздействия на раму с тремя степенями свободы, тем самым осуществляются колебательные, маятниковые, вибрационные движения рамы с пользователем под различными углами и скоростями; датчики, размещенные на теле, скафандре и тросах измеряют натяжение, давление, массу, углы и скорость устройства в динамике с последующей передачей информации в контроллер собирающий данные с проводных и беспроводных датчиков. Вывод пользователя из рабочего пространства устройства происходит в обратном порядке.
Формула полезной модели
1. Устройство для гироскопического и иммерсионного воздействия на человека при гравитационной растяжке, содержащее плоскую жесткую раму на опорах, на которой крестообразно расположены растягивающие пользователя тросы, одни концы которых соединены с подвижными блоками, а другие - с четырьмя манжетами-держателями соответственно для рук и ног пользователя, лебедку для приведения в движение посредством блоков упомянутых тросов и динамометр, снабжено тензометрическими проводными и беспроводными датчиками, при этом датчики установлены на каждом из растягивающих пользователя тросов с возможностью измерения натяжения для определения степени асимметрии тела пользователя и отклонения параметров от исходного состояния после растяжки, тензометрические датчики, установленные на теле пользователя для определения параметров гомеостаза при растяжке тела и его локальных участков и отклонения параметров от исходного состояния после растяжки с передачей информации и индикацией в контроллер, собирающий данные с проводных и беспроводных датчиков, отличающееся тем, что имеет плоскую жесткую раму для размещения в ней пользователя в состоянии гравитационного натяжения закрепленную на внутреннюю раму двухосного карданового подвеса, соединенную с внешней рамой, которая в свою очередь закреплена на оправу подвеса со статичным основанием, при этом жесткая плоская рама имеет закрывающийся корпус, представляющий собой емкость с возможностью заполнения ее внутреннего объема веществом, которое создает иммерсионный контакт с телом пользователя в состоянии гравитационного вытяжения, обеспечивая тем самым демпферное сопротивление силам гравитации и угловому ускорению для создания гироскопического и иммерсионного демпферного воздействия на тело пользователя с тремя степенями свободы конструкции в состоянии гравитационного вытяжения внутри рабочего пространства устройства.
2. Устройство по п. 1, отличающееся тем, что вещество может быть сухим, жидким или газообразным веществом.
Список литературы:
1. Описание к патенту RU 71256 U1, МПК А63В 21/06 (2006.01).
2. Описание к патенту RU 163537 U1, МПК А63В 21/00 (2006.01).
3. Описание к патенту RU 179871 U1, МПК А63В 21/06 (2000.01).
4. Описание к патенту RU 183752 U1, МПК А63В 21/00 (2006.01).
5. Описание к патенту RU 44505 U1, МПК А61Н 33/00 (2000.01).
6. Описание к патенту RU 2639062 С1, МПК А63В 23/02 (2006.01).
7. Анохин П.К. «Очерки по физиологии функциональных систем». - М.: Медицина, 1975г.
8. Малов Ю.С. «Адаптация и здоровье». Клиническая медицина №12, 2001г.
9. Маликов Т.Ф., Шнейдерман А.Л., Шулемович А.М. Расчеты упругих тензометрических элементов, М., 1964г.
10. Мехеда В.А. Тензометрический метод измерения деформаций: учеб. пособие, Самара: Изд-во Самарского гос. аэрокосмического университета, 2011г.
11. Поплавский М.А. Теория гироскопов. Киев, 1986г.